Kengoro the Robot ‘Sweats’ Thanks to 3D Printing

Japanese researchers came up with a way to cool down a humanoid robot named Kengoro — allowing it to sweat out of its 3D printed “bones”.
Humans sweat in order to cool down our muscles and avoid overheating. When we sweat, water is pumped out of our bodies and body heat is removed. It evaporates and cools us down in the process so we can keep going with our activities.
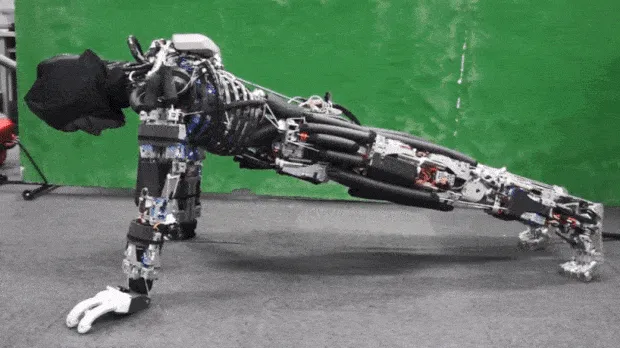
However, robots like Kengoro can also overheat when they have high torque demands on their motors. For this humanoid, that means doing push-ups for 11 minutes, running laps, and other ‘sporty’ activities. Much like a person, overexertion can be a major limitation to the robot’s performance.
There are many different ways that engineers can tackle this problem, such as using heat sinks, fans, and radiators. Unfortunately, all these cooling solutions take up valuable space and add extra weight to the robot’s frame.
This week at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Japanese researchers presented a totally new concept. They argue that a better way to cool a humanoid robot is to design it so it can sweat like a human.
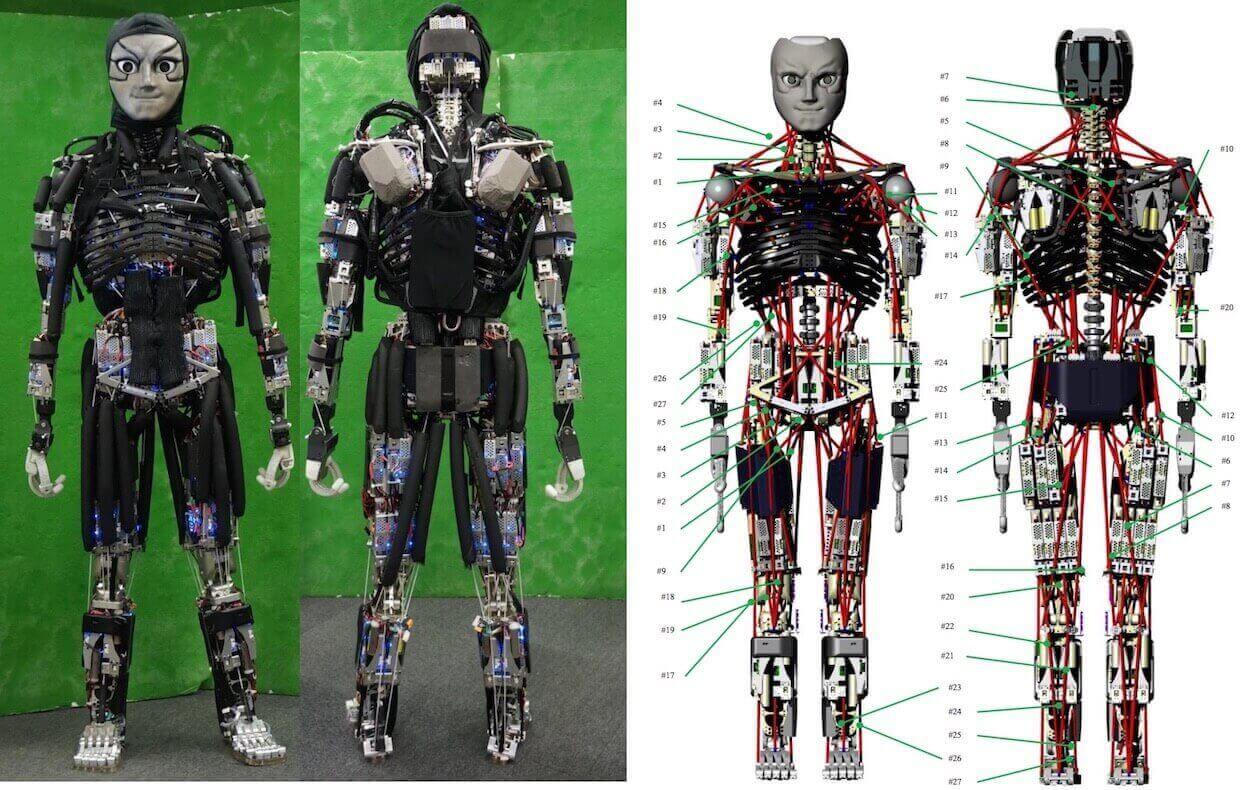
Kengoro – a robot with a 3D printed frame – demonstrated just how this new concept works.
“Usually, the frame of a robot is only used to support forces,” lead author Toyotaka Kozuki told IEEE Spectrum. “Our concept was adding more functions to the frame, using it to transfer water, release heat, and at the same time support forces.”
How Does Kengoro the Humanoid Robot Sweat?
The team from University of Tokyo’s JSK Lab built Kengoro to stand at 1.7 meters tall. But with a weight of 56 kilograms and 108 motors on board, there was no space for regular cooling systems. The researchers needed a way to add an efficient, yet light alternative.
They came up with the idea of using Kengoro’s existing components to create an effective cooling system. They decided to use the metal frame of the robot and try a “passive technique” which allows water to “sweat” out of the frame.
For this idea to work, and to avoid water spilling out everywhere, the team elected to create Kengoro’s frame from aluminum powders using selective laser sintering (SLS).
The researchers used a laser sintering process that allows them to modify the laser’s energy density and thus vary the permeability of the metal they produce. With laser sintering, they can fabricate the structure with areas of both low and high permeability, which was ideal for Kengoro.
Areas of the humanoid’s structure with high permeability have small gaps and tunnels for water to escape, while other areas have lower permeability. The finished aluminum ‘bones’ transport water, and porous layers near the surface of the robot’s frame allow the water to evaporate out.
As a result, Kengoro, can be active for much longer and can do sporty activities without overheating. Behold, the sweaty Terminator!
To learn more about Kengoro the robot, visit the JSK/University of Tokyo website.
License: The text of "Kengoro the Robot ‘Sweats’ Thanks to 3D Printing" by All3DP is licensed under a Creative Commons Attribution 4.0 International License.